GEMÜSEERNTEMODUL
Die COVID-19 Pandemie hat aufgezeigt, dass die systemische Abhängigkeit des lokalen Gemüsebaus von ausländischen Saisonarbeitskräften Krisen verstärken kann. Daraus resultiert ein gesteigerter Bedarf an nachhaltigen Automatisierungslösungen. Das in diesem Projekt entwickelte Gemüseerntemodul für Mehrzweck-Feldroboter (GEM) schließt diese Lücke, indem durch eine Vollautomation des Ernteprozesses die Notwendigkeit an monotoner und körperlich anstrengender Feldarbeit reduziert wird. Dadurch werden bei geringerem Aufwand höhere Erträge auf der Feldfläche erzielt.
Hardwareantwicklung
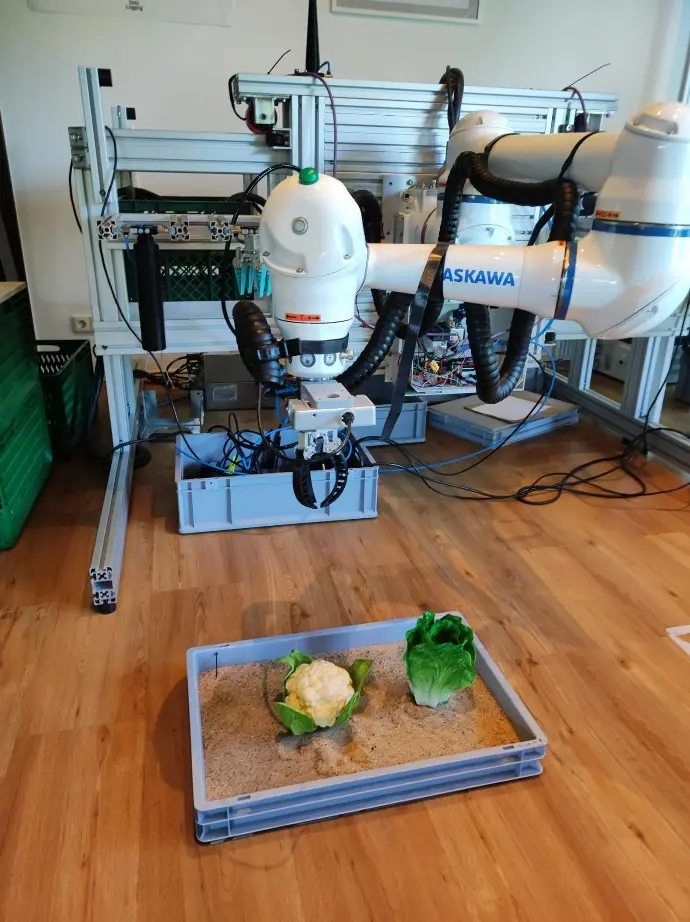
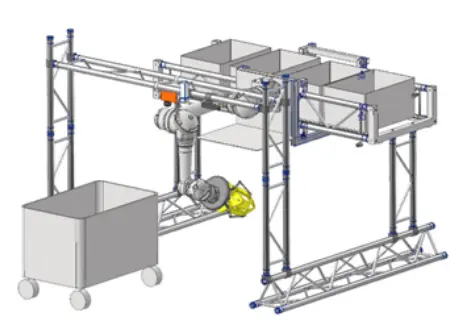
Das Gemüseerntemodul wird in drei verschiedenen Umgebungen entwickelt und erprobt. Der Roboterteststand im Labor, der abgebildtete Laboraufbau des Gesamtmoduls und im Rahmen der Systemintegration am DAVEGI.
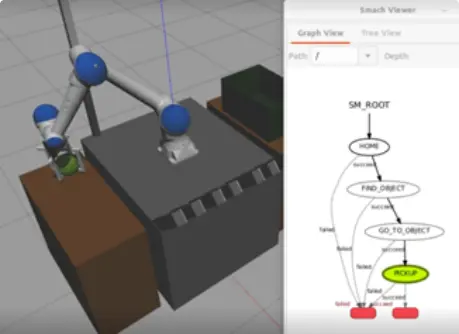
Softwareentwicklung
Alle benötigten Automatisierungsabläufe werden in Simulationsumgebungen entwickelt und erprobt, bevor sie auf das reale System übertragen werden.
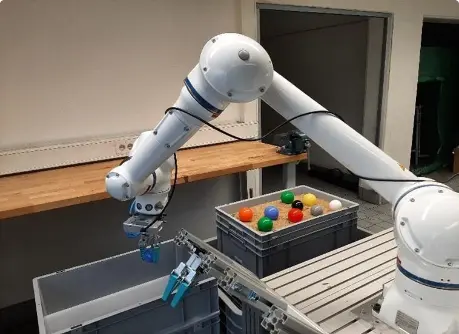
Laborversuche
Im Labor erfolgen Tests, tweileise auch an Kunstoffbällen, um unabhängig von der Fplanzenverfügbarkeit die Prozesse laufend verbessern zu können.
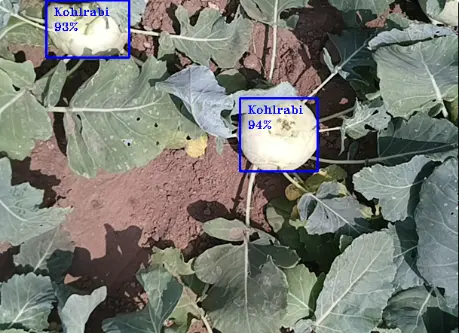
Pflanzenerkennung
Schlüsselfakto für eine erfolgreiche Ernte ist die Pflanzenerkennung. Dazu wird fortlaufend Bildmaterial aufgenommen, um im Anschluss mit Methoden des maschinellen Lernens für die Pflanzenerkennung verwendet zu werden.

Systemintegration und Feldtest
Am Ende steht die Systemintegration und Feldtest auf dem realen System. Die AI.Land GmbH verfolgt die modulare Nutzung des Erntemoduls im ETAROb und DAVEGI.
Gefördert durch


GEMÜSEERNTEMODUL
GEM soll die Forschung und Entwicklung eines multifunktionalen Ernteprozesswerkezeugs für verschiedene Gemüsekulturen schaffen, um Landwirte bei der Suche nach qualifizierten Saisonarbeitskräften zu entlasten und die Lebensmittelversorgung in Pandemiezeiten zu sichern. Das Gemüseerntemodul kann mit konventionellen Landmaschinen kombiniert werden. Aktuell gibt es vollautomatische Anbausysteme nur im Gewächshaus, wo hauptsächlich Kräuter und Blattgemüse produziert werden. Indoor-Farming ist aufgrund hoher Energiekosten und begrenzter Nährstoffbilanz wirtschaftlich nicht rentabel. Über 98% des Gemüses werden weltweit im Freiland angebaut, was in Deutschland effizienter ist, wenn die Abhängigkeit von günstigen Erntehelfern reduziert wird. Im Bereich der Wissenschaft werden zahlreiche Studien durchgeführt und Konzepte erprobt. Unser ETAROB ist dafür ein gutes Querschnittsbeispiel.
VHM unterstützt die Entwicklung von vollautonomen landwirtschaftlichen Systemen mit Schwerpunkt auf der Gerätetechnik. Der Ertrag wird durch selektive Methoden gesteigert. Das bedeutet, dass auf weniger Ackerfläche mehr angebaut werden kann. Das Ziel ist: Eisbergsalat, Weißkohl, Rotkohl, Brokkoli, Kohlrabi, Blumenkohl und Sellerie.
Feldroboter erschließen eine Vielzahl von Synergieeffekten. Wenngleich der Transfer in die landwirtschaftliche Praxis noch sehr jung ist, so wird mit einer steigenden Anzahl von Präzisionswerkzeugen durschlagende Effekte für den Klimaschutz, Ressourcenschonung und Biodiversität erzielt.